

































WAVE ROVER Flexible And Expandable 4WD Mobile Robot Chassis






New






WAVE ROVER Flexible And Expandable 4WD Mobile Robot Chassis
R1,899.00
Ex Tax: R1,651.30












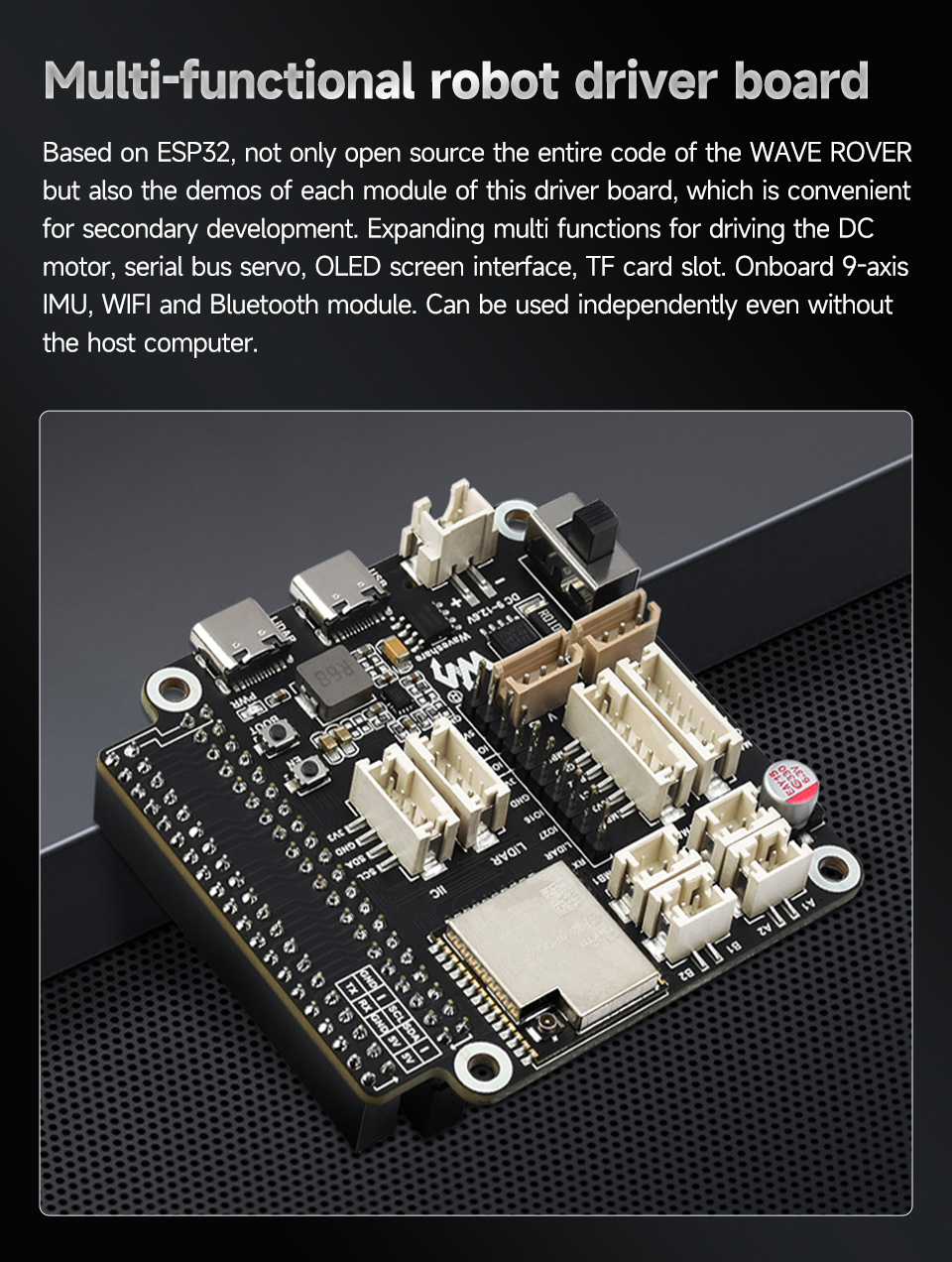
① About the slave computer driver board, please refer to General-Driver-for-Robots product page for more details.
② The driver board has onboard UART to USB circuit for data transmission between Lidar and the host computer.
② The driver board has onboard UART to USB circuit for data transmission between Lidar and the host computer.
Resources & Services


* Resources for different product may vary, please check the wiki page to confirm the actually provided resources.


























