

































High-torque ESP32 4-DOF RoArm-M2-S Desktop Robotic Arm Kit
















4-DOF High-Torque Serial Bus Servo Robotic Arm
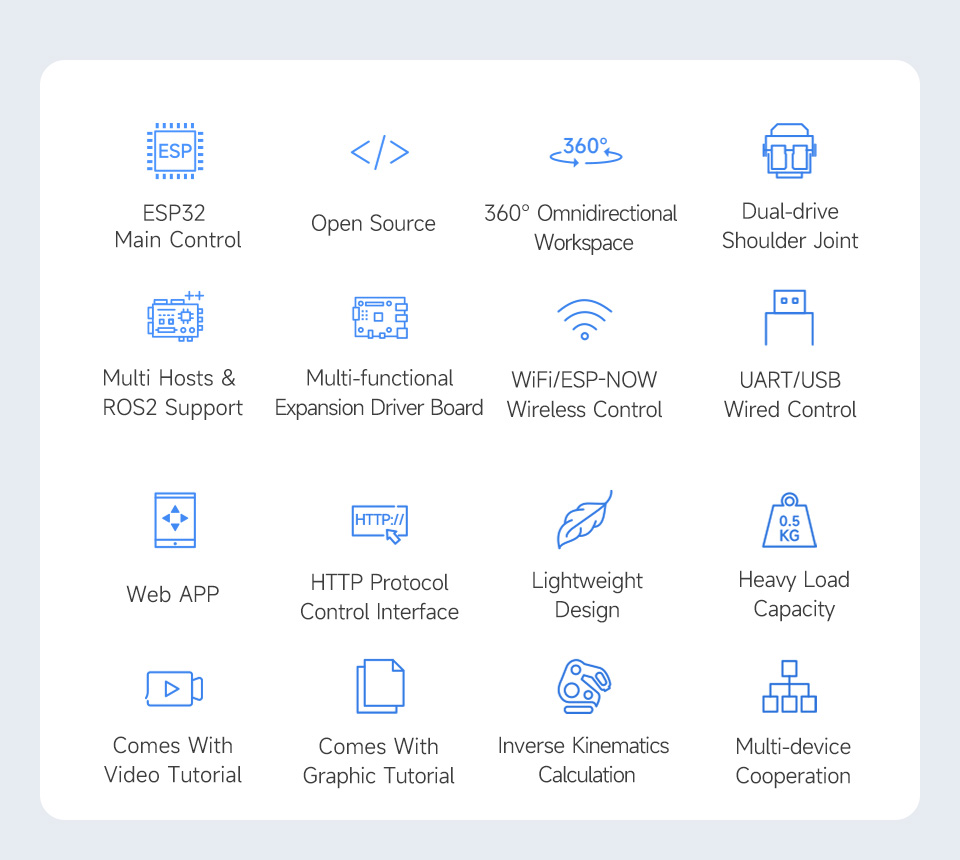
Supports Flexible Expansion And Secondary Development


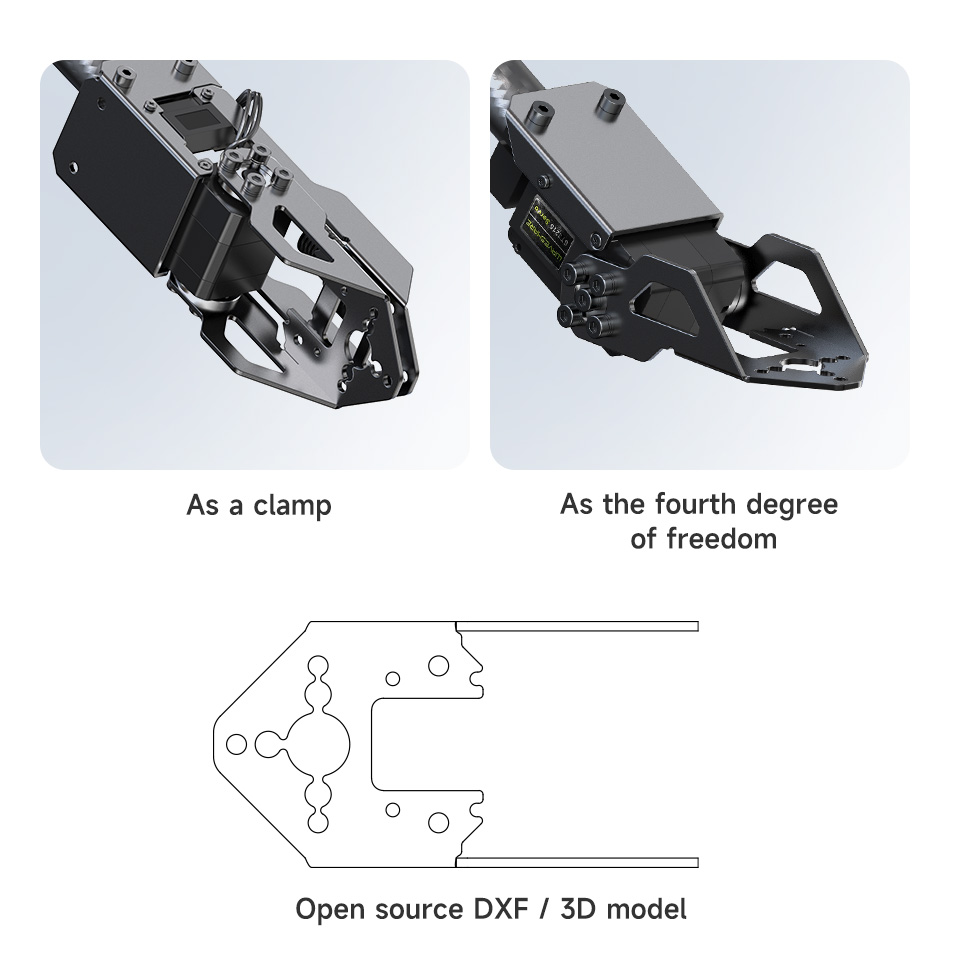
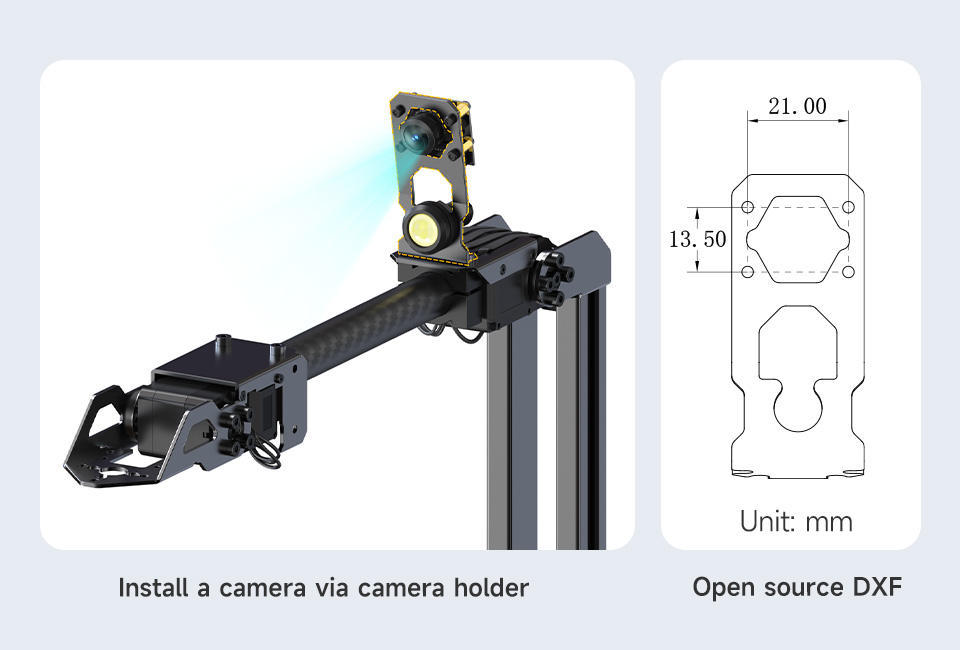
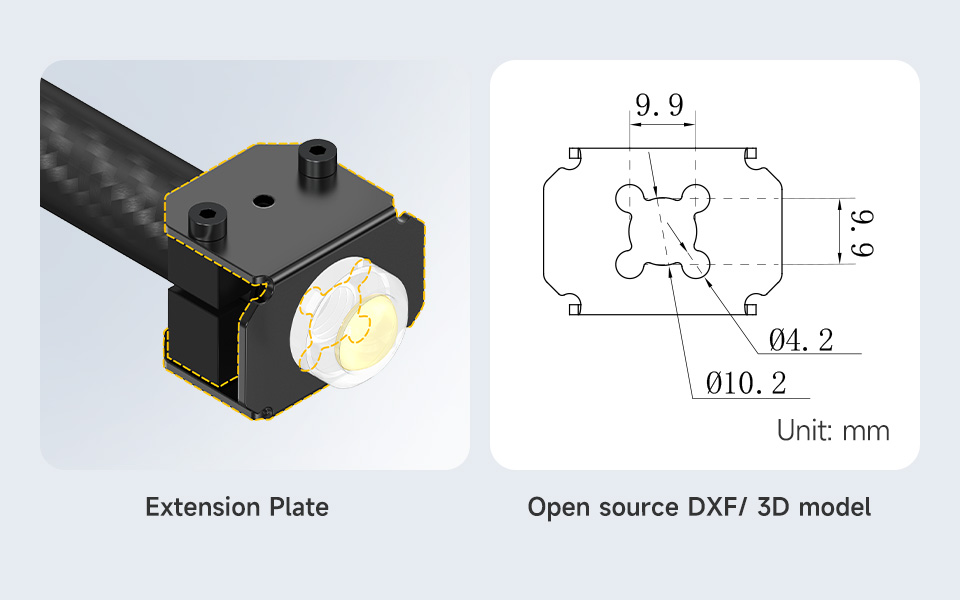
The EoAT Supports Various Mounting Methods, Can Be Used As A Clamp Or As The Fourth Degree Of Freedom. Provides Open-Source DXF And 3D Models For DIY And Secondary Development
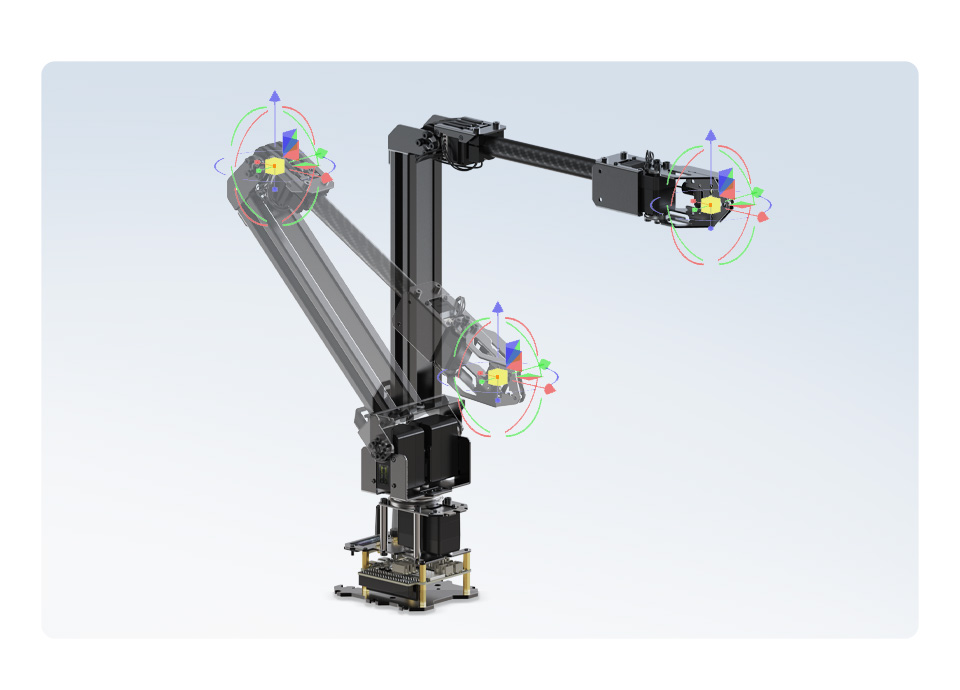
Adopts 360° Rotation Base And Flexible Joints To Create An Omnidirectional Operating Space With A 1-Meter Diameter, Allowing The EoAT To Move Freely In All Directions

Cross-Platform Web Application
No App installation required, access after entering the address. Allows users to connect and control RoArm-M2-S via mobile phones, tablets and computers by clicking the buttons on the Web App. Supports secondary development of this open-source Web App to customize the user interface and add new functions.




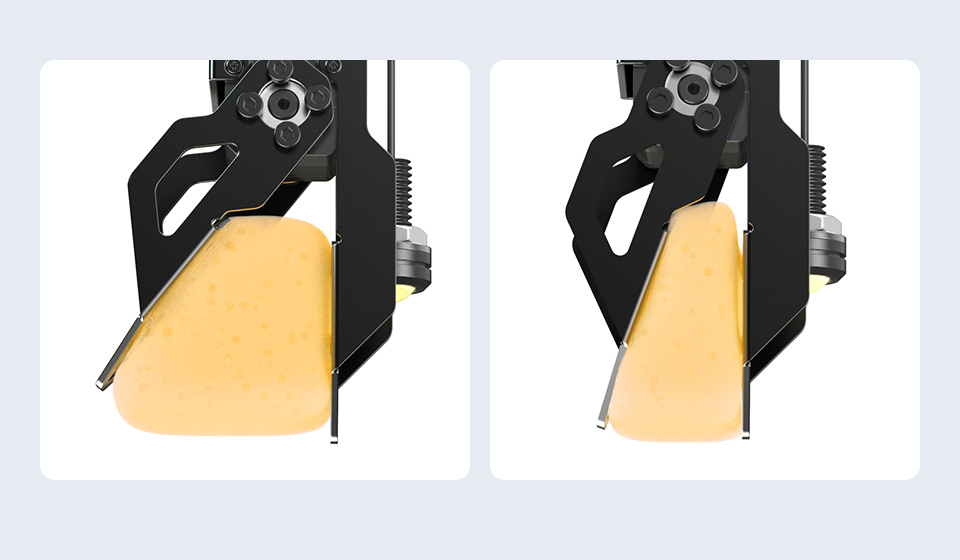
To Compensate For The Influence
Of Gravity
The SHOULDER and ELBOW joints support installing the rubber bands to assist the robotic arm, by utilizing the elastic contraction of rubber bands to compensate for the influence of gravity and increase the effective load of the robotic arm.
Adaptive Control
After enabling this function, you can limit the maximum torque for each joint. When the external force applied to the joint exceeds the torque threshold (configurable), the robotic arm will rotate in response to the external force, and will return to the specified position when the external force decreases below the torque threshold.

Open source for inverse kinematics control algorithm in the three-dimensional Cartesian coordinate system. After entering the target position, the robot arm can accurately reach the target point by using the inverse kinematics function to calculate the rotation angle of each joint.
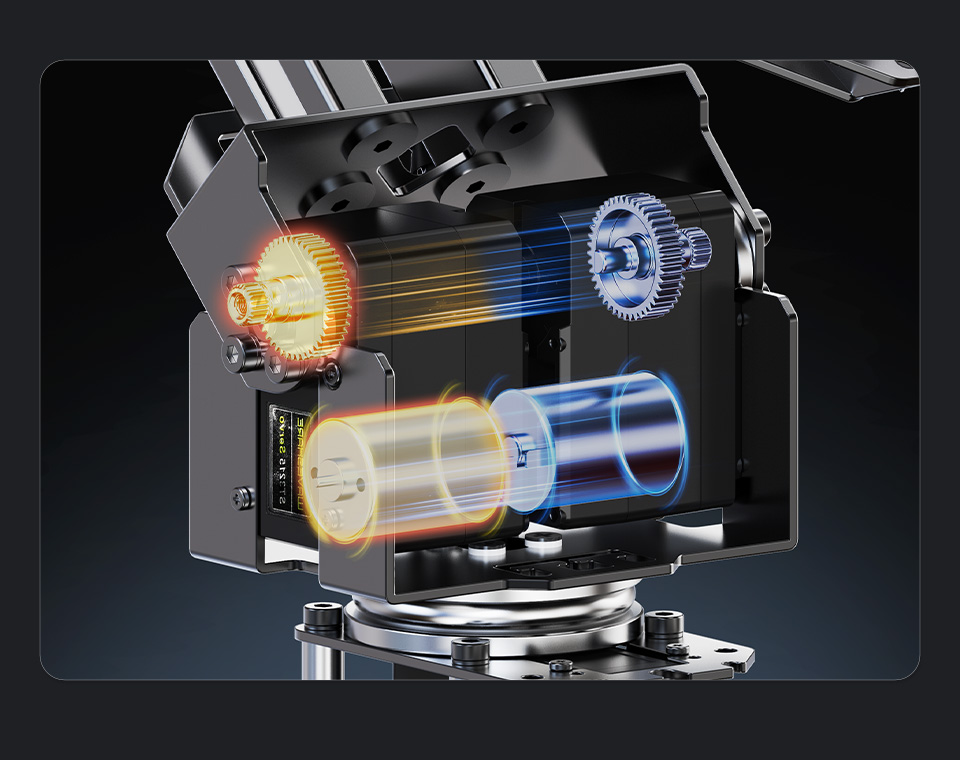
Smoother Movement
We Use The Curve Velocity Control Algorithm To Make The Robotic Arm Move Smoother And More Naturally, Without Oscillations During Start And Stop

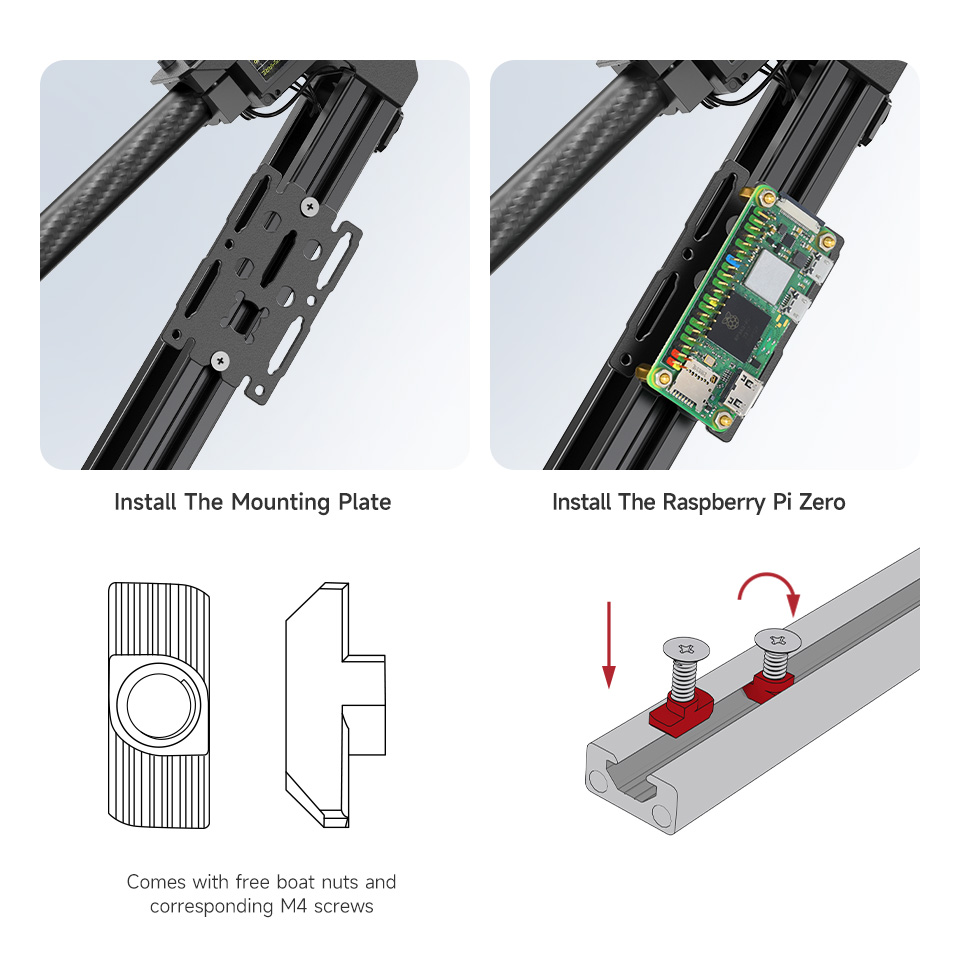
Provides Multiple Installation Schemes And Related Secondary Development Resources, Suitable For Different Usage Scenarios And Can Be Flexibly Integrated Into Your Projects And Applications

The main structure of the upper arm adopts two 1020 European standard aluminum rails, supports installing additional peripherals via the boat nuts to meet different needs. Comes with boat nuts and corresponding M4 screws for easy installation.

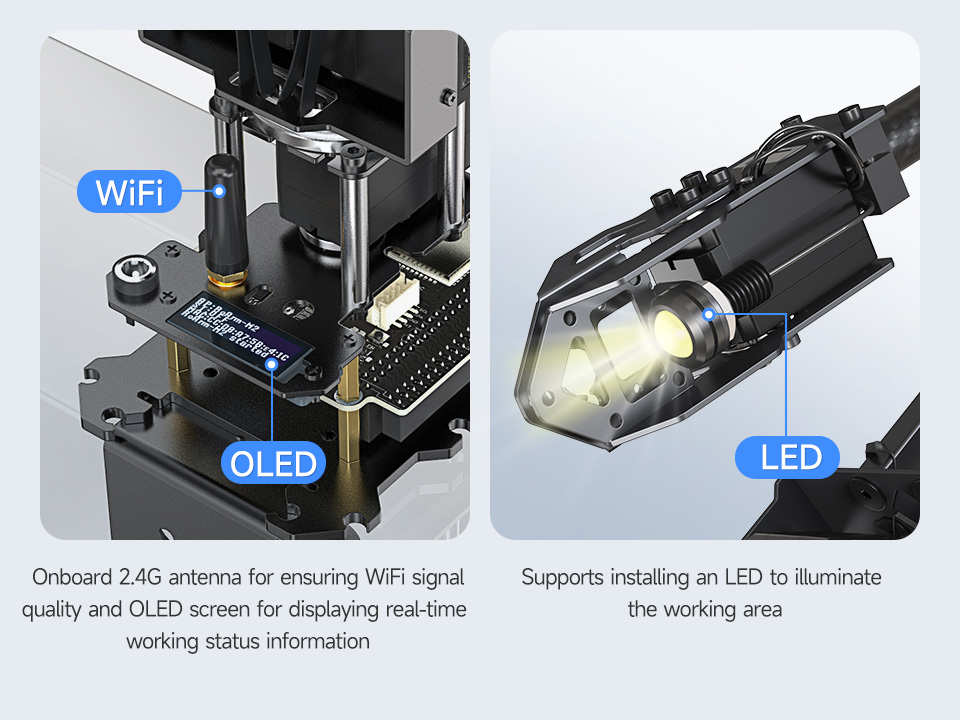
Onboard Rich Interfaces And Resources For Innovative Development And Functional Expansion
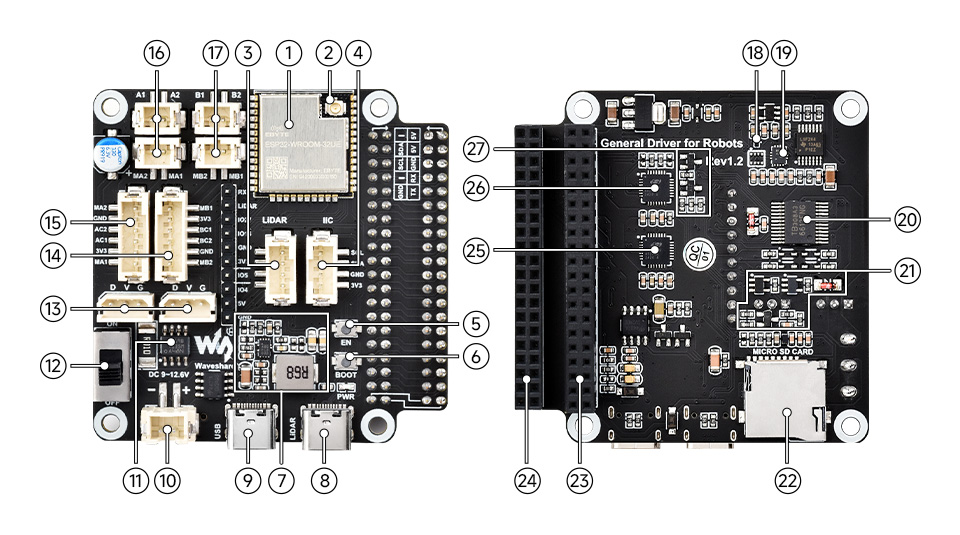
- ESP32-WROOM-32 controller module
Can be developed using Arduino IDE - IPEX1 WIFI connector
For connecting WIFI antenna to increase the wireless communication distance - LIDAR interface
Integrated radar adapter function - I2C peripheral expansion interface
For connecting with OLED screen or other I2C sensors - Reset Button
Press and release to reboot the ESP32 - Download button
The ESP32 will enter the download mode after powering on - DC-DC 5V voltage regulator circuit
Power supply for host computers such as Raspberry Pi or Jetson nano - Type-C port (LADAR)
LIDAR data transmission - Type-C port (USB)
ESP32 communication interface, for uploading programs to ESP32 - XH2.54 power port
Support DC 7~13V input, can directly power the serial bus servos and motors - INA219
voltage/current monitoring chip - Power ON/OFF
External power supply ON/OFF - ST3215 serial bus servo interface
For connecting with ST3215 serial bus servo - Motor interface PH2.0 6P
Group B interface for motor with encoder
- Motor interface PH2.0 6P
Group A interface for motor with encoder - Motor interface PH2.0 2P
Group A interface for motor without encoder - Motor interface PH2.0 2P
Group B interface for motor without encoder - AK09918C
3-axis electronic compass - QMI8658C
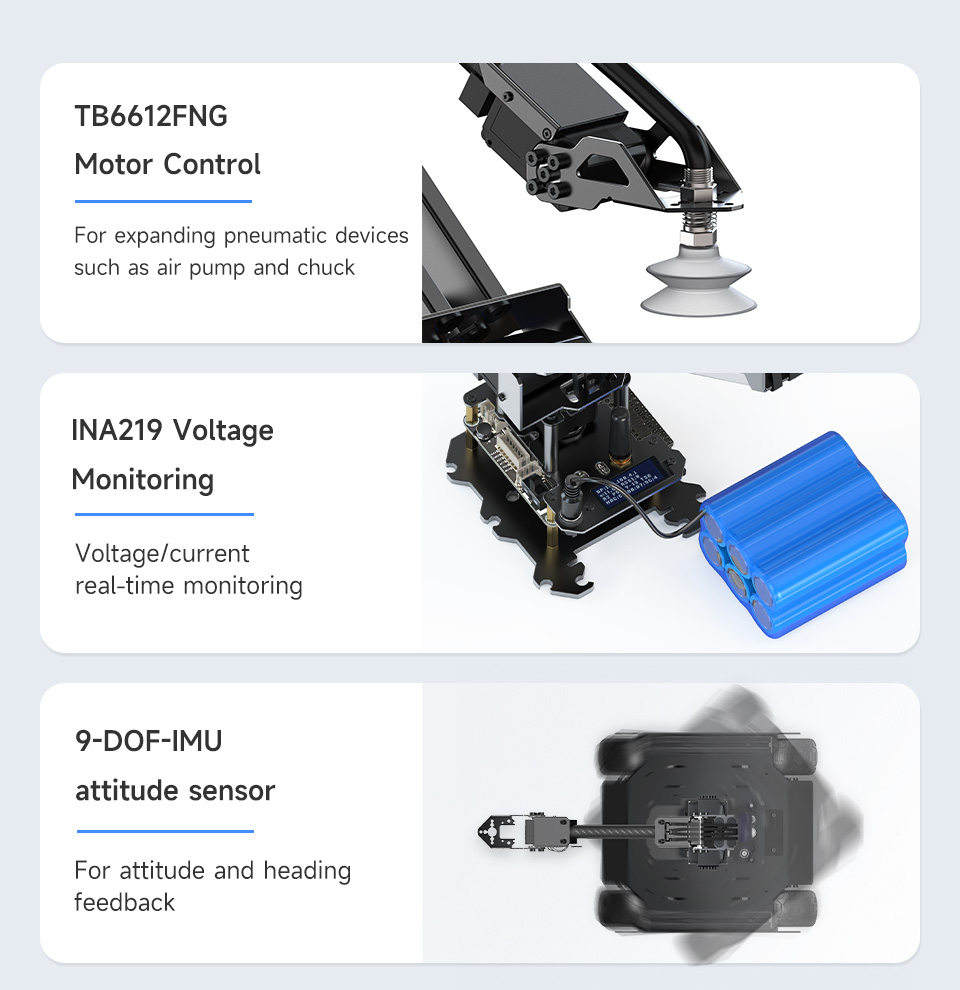
6-axis motion sensor - TB6612FNG
Motor Control Chip - Serial bus servo control circuit
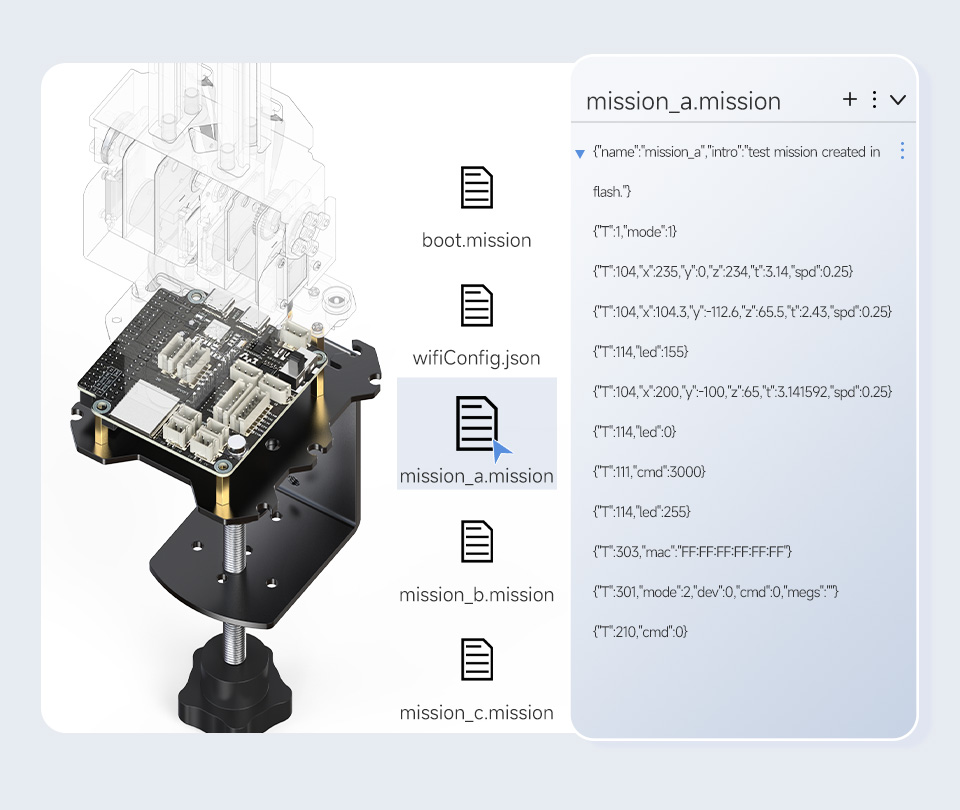
for controlling multiple ST3215 serial bus servos and obtaining servos feedback - TF card slot
Can be used to store logs or WIFI configurations - 40PIN GPIO header
For connecting with Raspberry Pi or other host boards - 40PIN extended header
Easy to use the GPIO pins of Raspberry Pi or other host boards - CP-2102
UART to USB, for radar data transmission - CP-2102
UART to USB, for ESP32 communication - Automatic download circuit
For Uploading programs to the ESP32 without pressing the EN and BOOT buttons

| DOF | 4 |
|---|---|
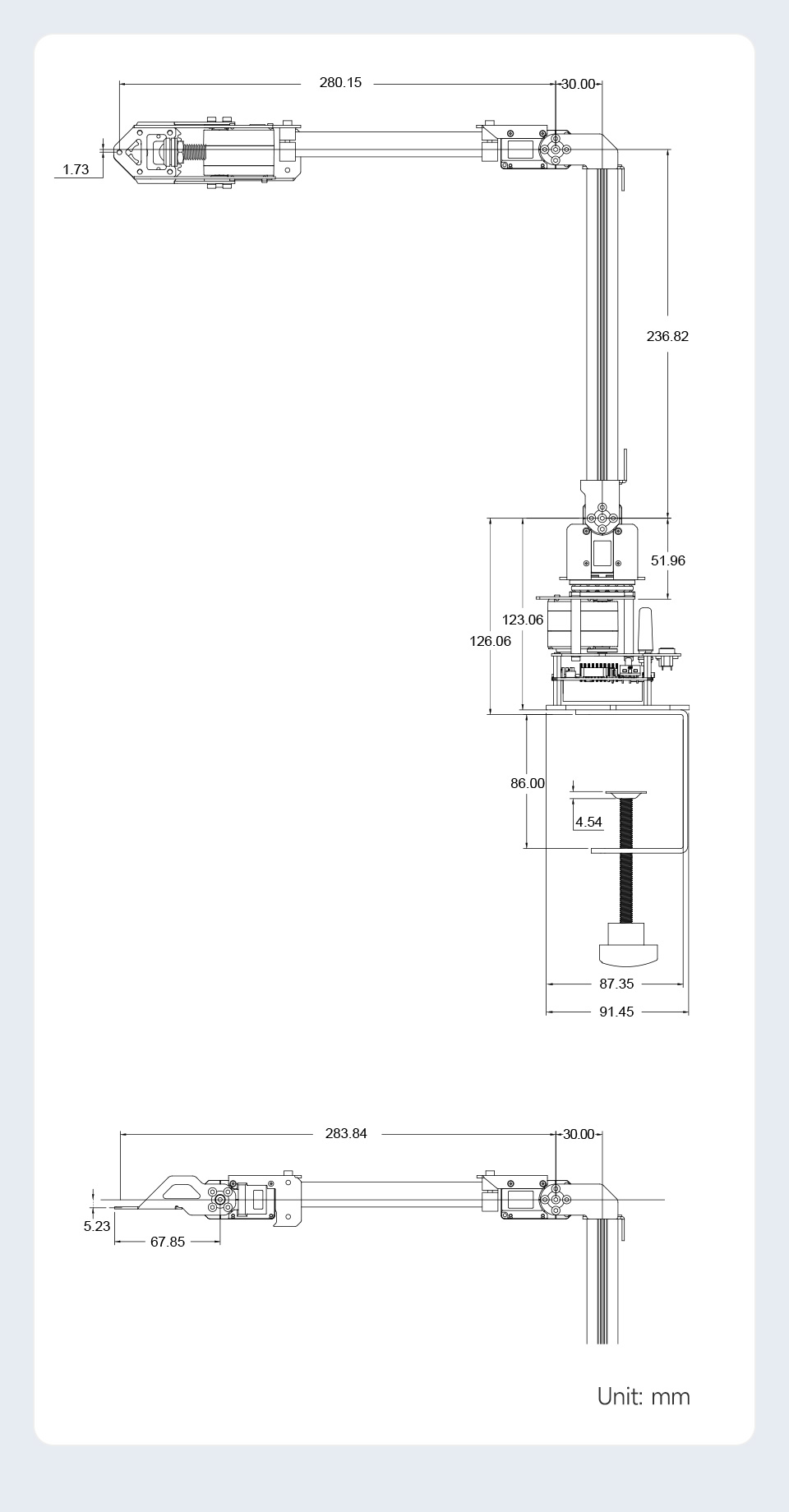
| WORK SPACE | Horizontal diameter: 1090mm (Max, 360° omnidirectional), Vertical: 798mm (Max) |
| OPERATING VOLTAGE | 12V 5A power supply, supports 3S Lithium batteries (NOT included) |
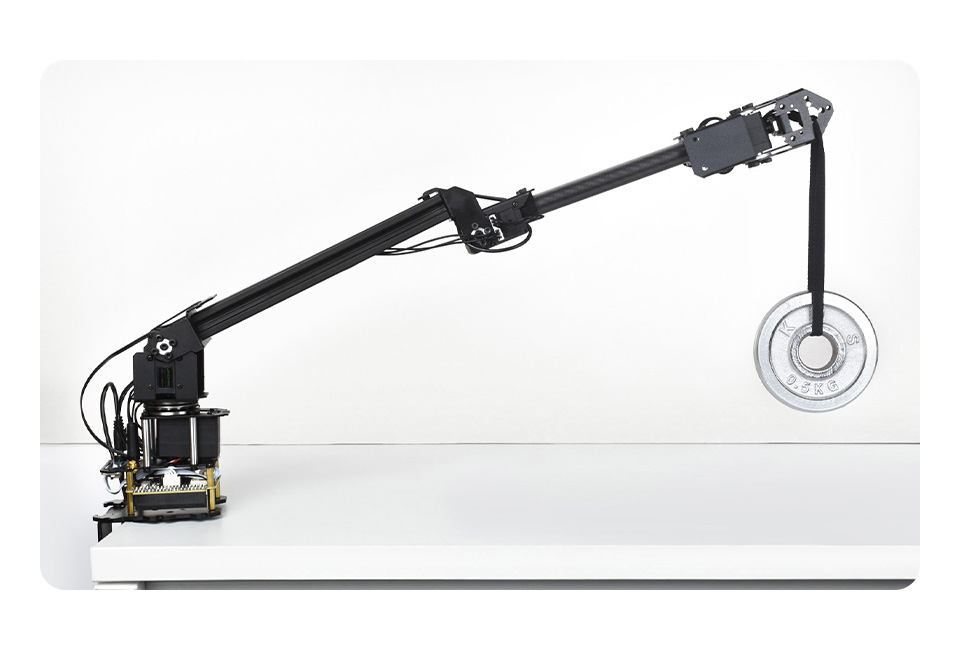
| LOAD CAPACITY | 0.5kg@0.5m |
| REPOSITIONING PRECISION | ≈±4mm (under the same load) |
| SERVO ROTATION SPEED | 40rpm (no-load, no torque limit) |
| OPERATING RANGE | BASE-360°, SHOULDER-180°, ELBOW-180°, HAND-135°/270° |
| DRIVE TYPE | TTL Serial bus servo, direct-drive joint |
| SERVO NUMBERS | 5 |
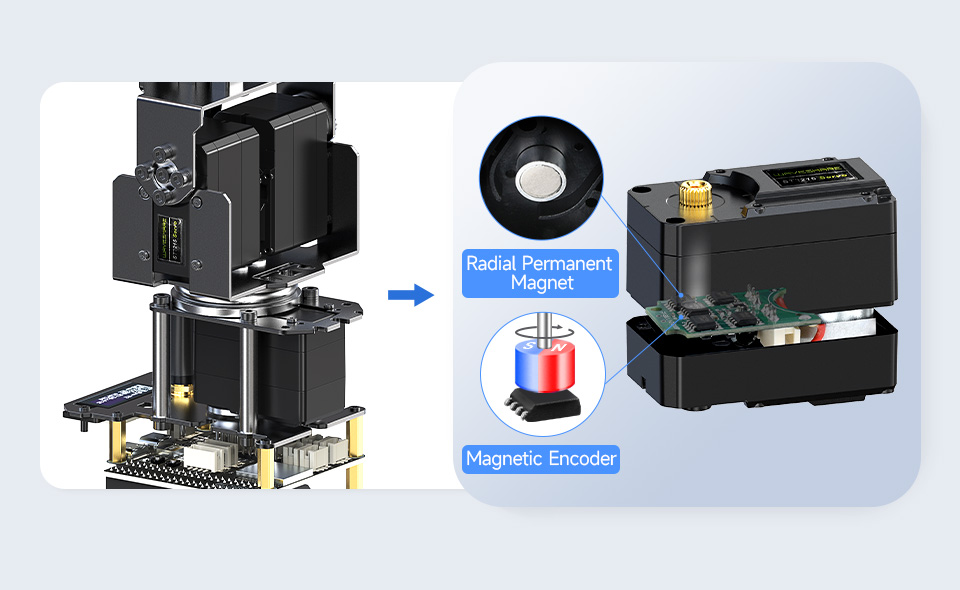
| JOINT ANGLE SENSOR | 12-bit 360° magnetic encoder |
| SERVO TORQUE | 30KG.CM @12V |
| JOINT FEEDBACK INFORMATION | servo status, joint angle, rotation speed, joint load, servo voltage, servo current, servo temperature and servo working mode |
| MAIN CONTROL | ESP32-WROOM-32 |
| MAIN CONTROL MODULE FEATURES | WiFi, BT, Dual Core, 240MHz |
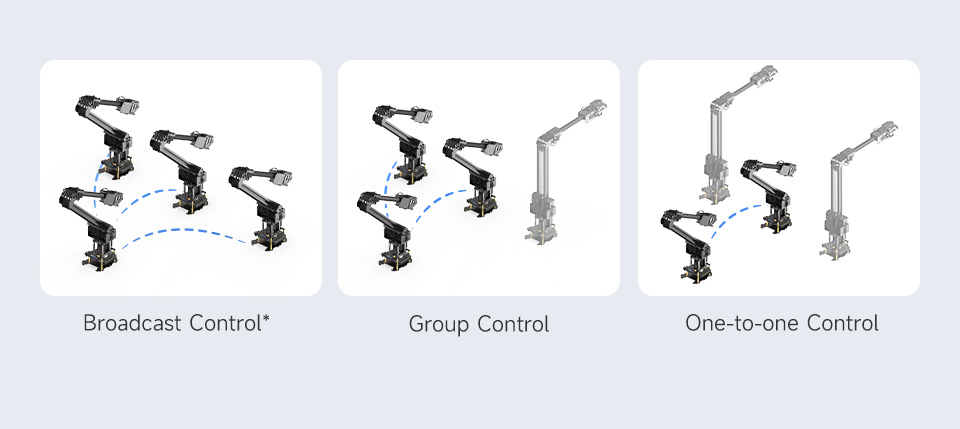
| WIRELESS CONTROL MODE | 2.4G-WiFi, ESP-NOW |
| WIRED CONTROL MODE | USB, UART |
| MANUAL OPERATION MODE | WEB control interface |
| HOST OPERATION MODE | UART/USB/ESP-NOW*/HTTP communication via JSON data format commands (* it does not support obtaining feedback information if using ESP-NOW communication) |
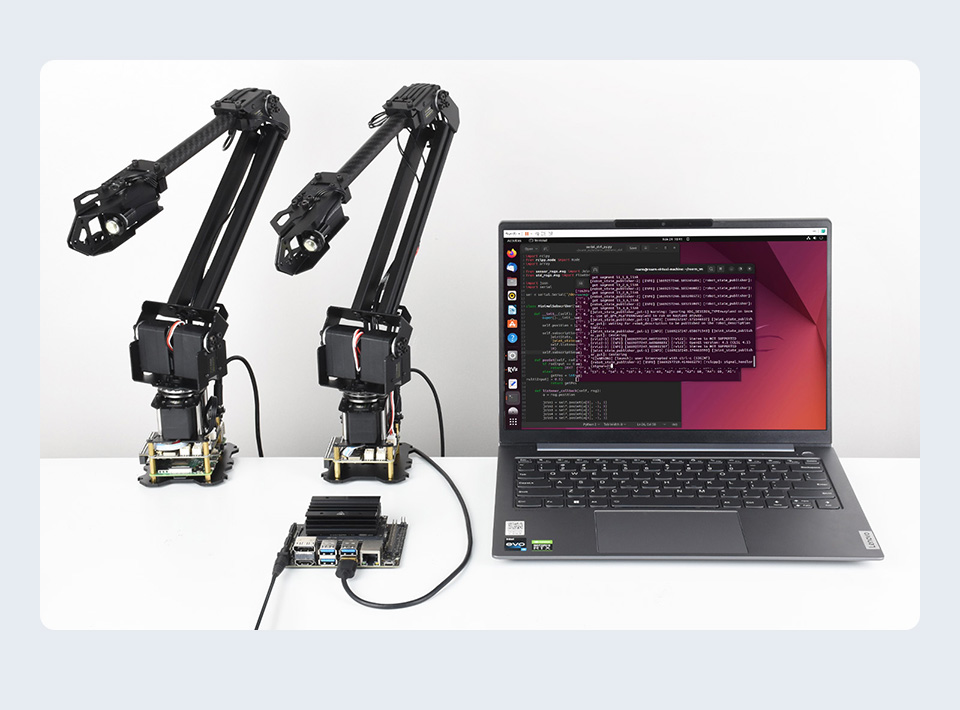
| HOST SUPPORT | USB connection devices including Raspberry Pi, Jetson Orin Nano, and PC. |
| EOAT FUNCTION | clamp function by default, can be changed as an additional degree of freedom |
| LED POWER | ≤1.5W |
| OLED SCREEN SIZE | 0.91inch |
| OTHER FUNCTIONS | 2-ch 12V power supply switch, 9-DOF IMU |
| ROBOTIC ARM WEIGHT | 826 ±15g (not including the table edge fixing clamp) |
| TABLE EDGE FIXING CLAMP WEIGHT | 286 ± 10g |
| SUPPORTED TABLE EDGE THICKNESS OF THE CLAMP | <72mm |
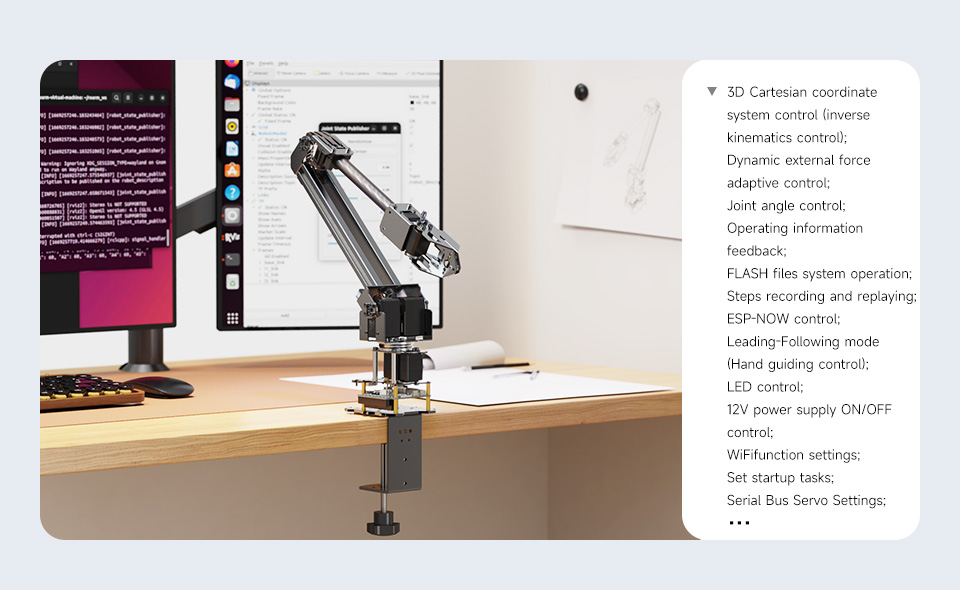
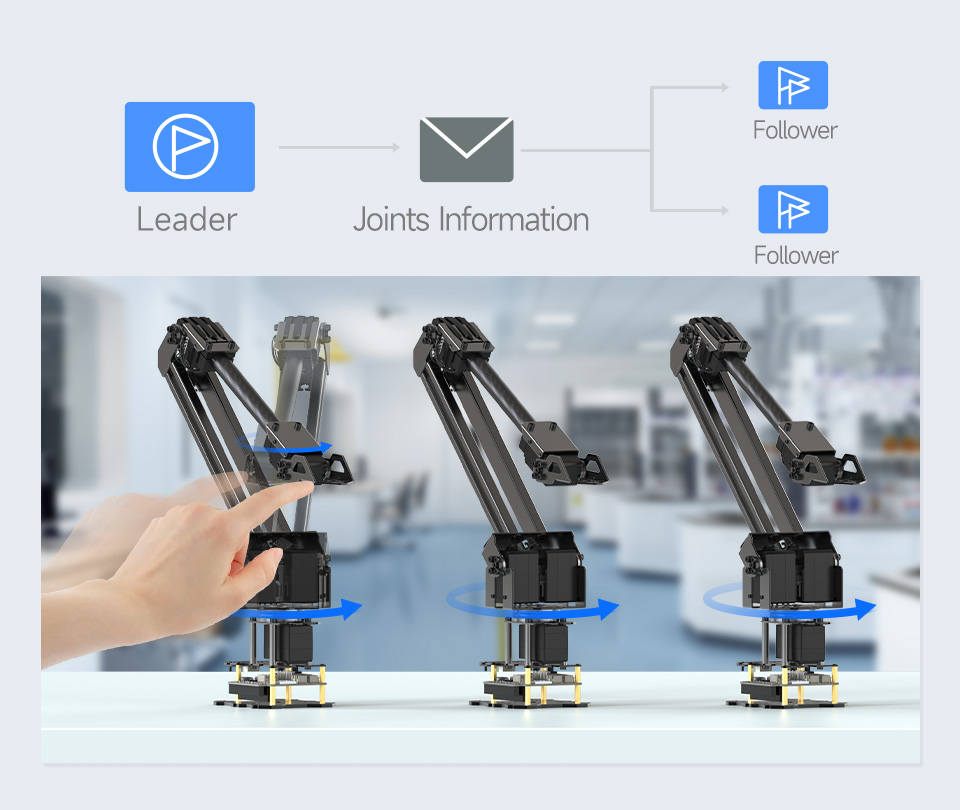
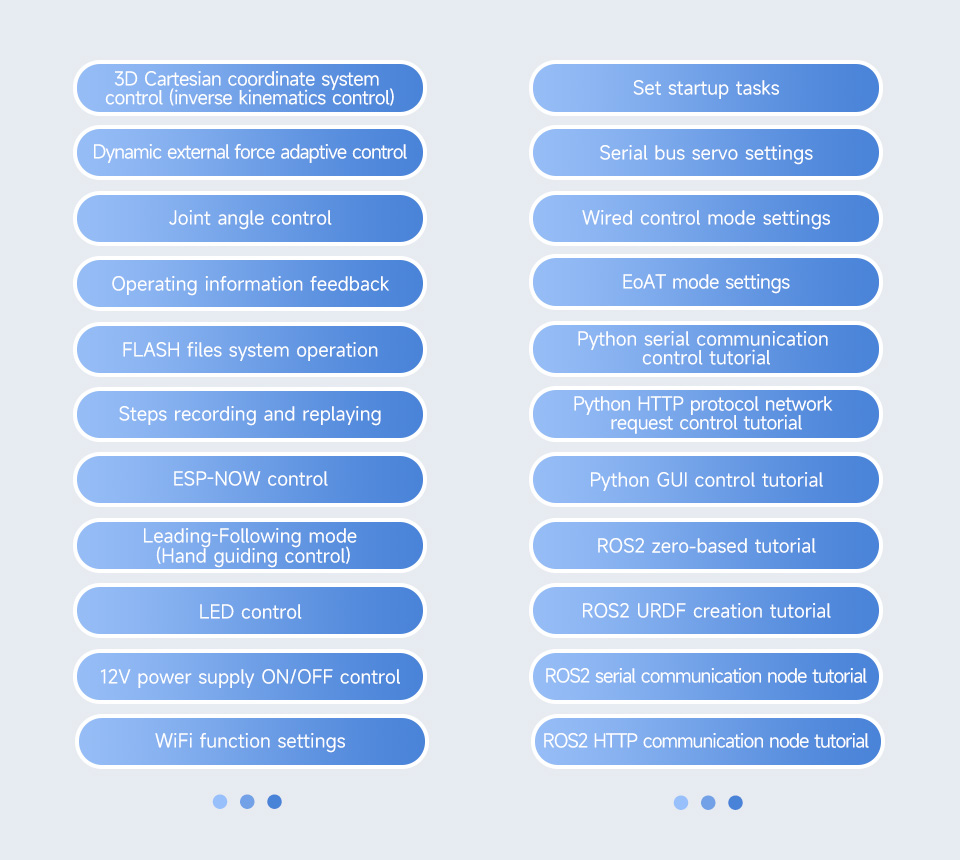
| DEMO | 3D Cartesian coordinate system control (inverse kinematics control); Dynamic external force adaptive control; Joint angle control; Operating information feedback; FLASH files system operation; Steps recording and replaying; ESP-NOW control; Leading-Following mode (Hand guiding control); LED control; 12V power supply ON/OFF control; WiFi function settings; Set startup tasks; Serial bus servo settings; Feedback mode setting; EoAT mode setting, etc. (Note: Please refer to the WIKI for more details) |



* Resources for different product may vary, please check the wiki page to confirm the actually provided resources.

























